本文是最近开发的一个简单的 C++ 行为树库 bt.cc 的开发笔记。
行为树是游戏和机器人中 AI 领域最常用的编程模式之一。
这里所说的 AI 不是指机器学习那一套,而是「硬AI」,或者说是一种「伪 AI」,因为其中并没有真正的智能,只是行为的丰富性让实体看上去有了智能而已。
说白了就是 如何模块化的组织好预设的行为模块,本质上是一种编程框架。
设计要点 ¶
实体的状态和数据,同行为分离。
如果存在大量的同一种实体、有着同一套行为,我们期望把所有实体放在一起存储(比如放在一块连续内存上),那么如何把行为和实体的状态数据分离是一个问题。
代码按树状结构组织成树。
行为树本身是一个树状结构,那么在代码中即可组织成一颗树的模样,清晰直观。
支持带优先级的、随机的、带状态的行为。
行为树 ¶
各个事先设计好的行为模块组织成树,从树根递归向子孙节点传播 Tick() 调用,根据节点的类型不同,形成不同的行为模式。
在执行 Tick 函数之后,节点要回答其状态:
bt::Status::RUNNING // 执行中
bt::Status::FAILURE // 已失败
bt::Status::SUCCESS // 已成功
最基础的几种节点,如下分类:
叶子节点:没有任何子节点
具体有两种:
Action和Condition。其中
Action负责执行一个具体的动作,Condition则检查一个具体的条件而不含RUNNING状态。比如说,下图中,只有当条件
C检查成功后,才会执行动作A。
Condition 的一个示意实现
virtual bool ConditionNode::Check(const Context& ctx); // 需要填充 Status ConditionNode::Update(const Context& ctx) override { return Check(ctx) ? Status::SUCCESS : Status::FAILURE; }有的行为树库直接把条件节点实现为一种装饰节点,用起来更方便。在
bt.cc中我做了一个类似的叫做ConditionalRun的装饰节点。ConditionRun 的一个示意实现
Status ConditionalRunNode::Update(const Context& ctx) { // condition 是一个 Condition 节点, child 是另一个子节点 if (condition->Tick(ctx) == Status::SUCCESS) return child->Tick(ctx); return Status::FAILURE; }单孩子节点:即只含有一个子节点,代表就是装饰器节点
Decorator。比如说,下图中,
Repeat(2)是一个循环节点,直到其修饰的子节点成功执行两次,它才向上汇报成功。 也就是,在第二帧的时候,动作A第二次成功时,根节点才成功。Repeat 节点的一个示意实现
Status RepeatNode::Update(const Context& ctx) { auto status = child->Tick(ctx); if (status == Status::RUNNING) return Status::RUNNING; if (status == Status::FAILURE) return Status::FAILURE; if (++counter == n) return Status::SUCCESS; return Status::RUNNING; }
组合节点:可以包含多个子节点。
又可以继续细分为三种:
Sequence: 全部子节点返回成功时,才成功,否则一个失败即全部失败。Sequence 节点的一个示意实现
Status SequenceNode::Update(const Context& ctx) override { for (auto& c : children) { auto status = c->Tick(ctx); if (status == Status::RUNNING) return Status::RUNNING; if (status == Status::FAILURE) return Status::FAILURE; } return Status::SUCCESS; }下图中,左边的在 3 帧全部成功后,
sequence节点才会汇报成功。而右边的,一旦遇到一个失败的子节点会立即汇报失败、不再继续尝试后续的子节点。
Selector: 全部子节点返回失败时,才失败,否则一个成功即全部成功。Selector 节点的一个示意实现
Status SelectorNode::Update(const Context& ctx) override { for (auto& c : children) { auto status = c->Tick(ctx); if (status == Status::RUNNING) return Status::RUNNING; if (status == Status::SUCCESS) return Status::SUCCESS; } return Status::FAILURE; }下图中,左边的在第 2 帧就遇到一个成功的子节点,直接汇报成功。右边的会在 3 帧所有孩子失败后,汇报失败。

Parallel: 并行检查所有子节点,全部成功时才算成功,否则算作失败。和前面的两个不同之处在于,
Parallel节点无论如何会执行一遍每一个子节点,最后再汇总结果。Parallel 节点的一个示意实现
Status ParallelNode::Update(const Context& ctx) override { int cntFailure = 0, cntSuccess = 0; for (auto& c : children) { auto status = c->Tick(ctx); if (status == Status::FAILURE) cntFailure++; if (status == Status::SUCCESS) cntSuccess++; } if (cntSuccess == children.size()) return Status::SUCCESS; if (cntFailure > 0) return Status::FAILURE; return Status::RUNNING; }比如说下图中,左右两边都会让每个子节点被执行到,但是根据成功子节点的个数来汇总决定
Parallel的最终结果。





当然,上面给出的代码,属于第一版的实现,最终因为 bt.cc 加入了 Stateful 组合节点、和 优先级等因素,实现变的稍许复杂了一些, 不过道理仍然是这个道理。
可视化 ¶
如果要画一张图来表示一颗行为树,可以有两种方式:
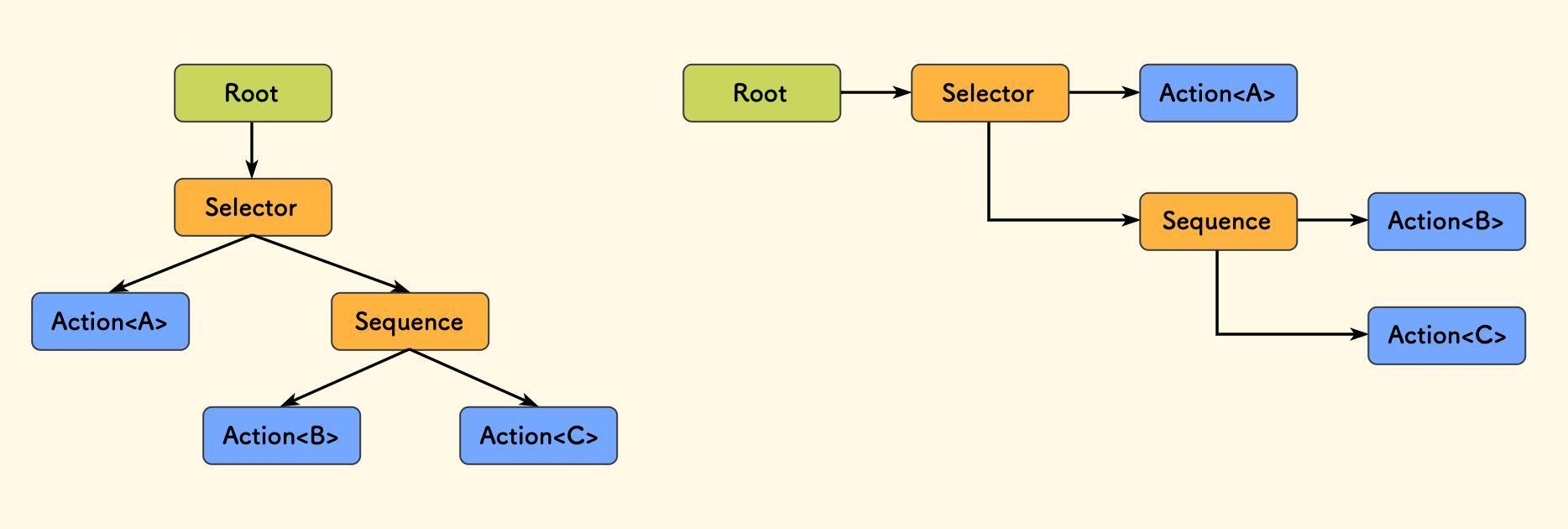
左边是一个中规中矩的树状结构,右边则整齐很多,所以我推荐右边的方式,在这种方式下:
- 自上而下是兄弟节点的优先级关系,上面的更优先
- 自左而右是父子关系。
深度优先的情况下就是先从左向右、然后再向下走。
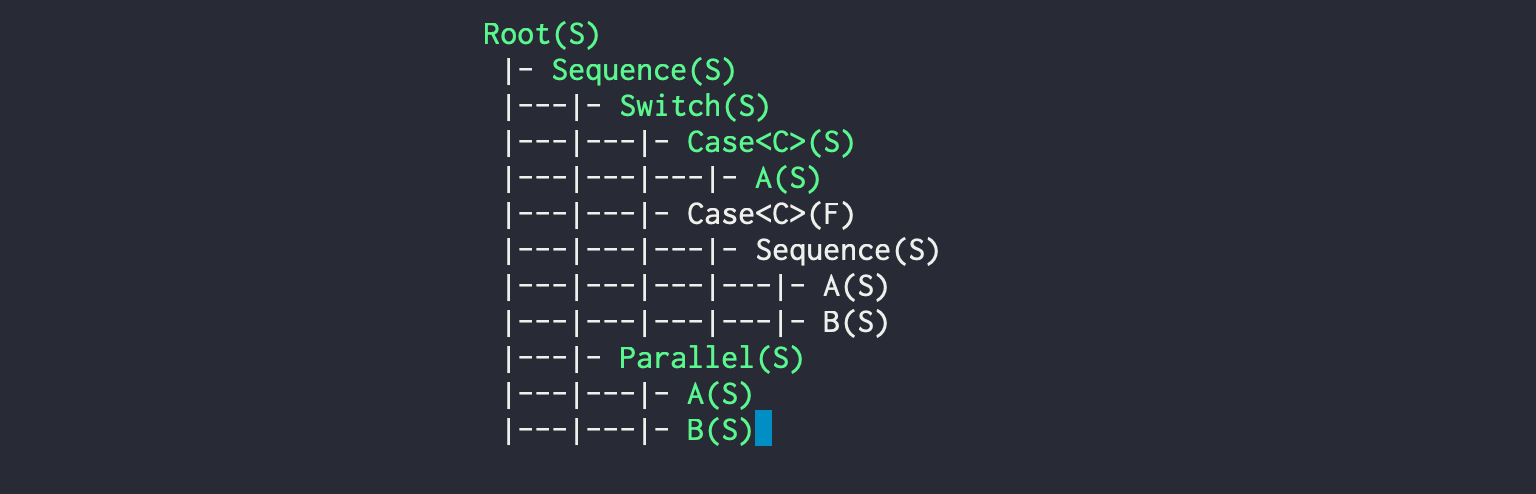
bt.cc 支持一个简单的功能,就是输出到 console 可视化行为树的每一帧, 也是按照这种方式来排列一颗行为树的,其中绿色的是正在激活中的节点:
组织一颗行为树 ¶
在代码中,同样遵循着这种排列方式:
bt::Tree root;
root
.Sequence()
._().If<A>()
._()._().Action<B>()
._().Selector()
._()._().Action<C>()
._()._().Parallel()
._()._()._().Action<D>()
._()._()._().Action<E>()
.End()
;
其中,一个特殊的方法 _() 负责递增缩进,这样整个代码看上去就是这颗行为树最终的样子。
细节只是,不要忘记调用 End()。
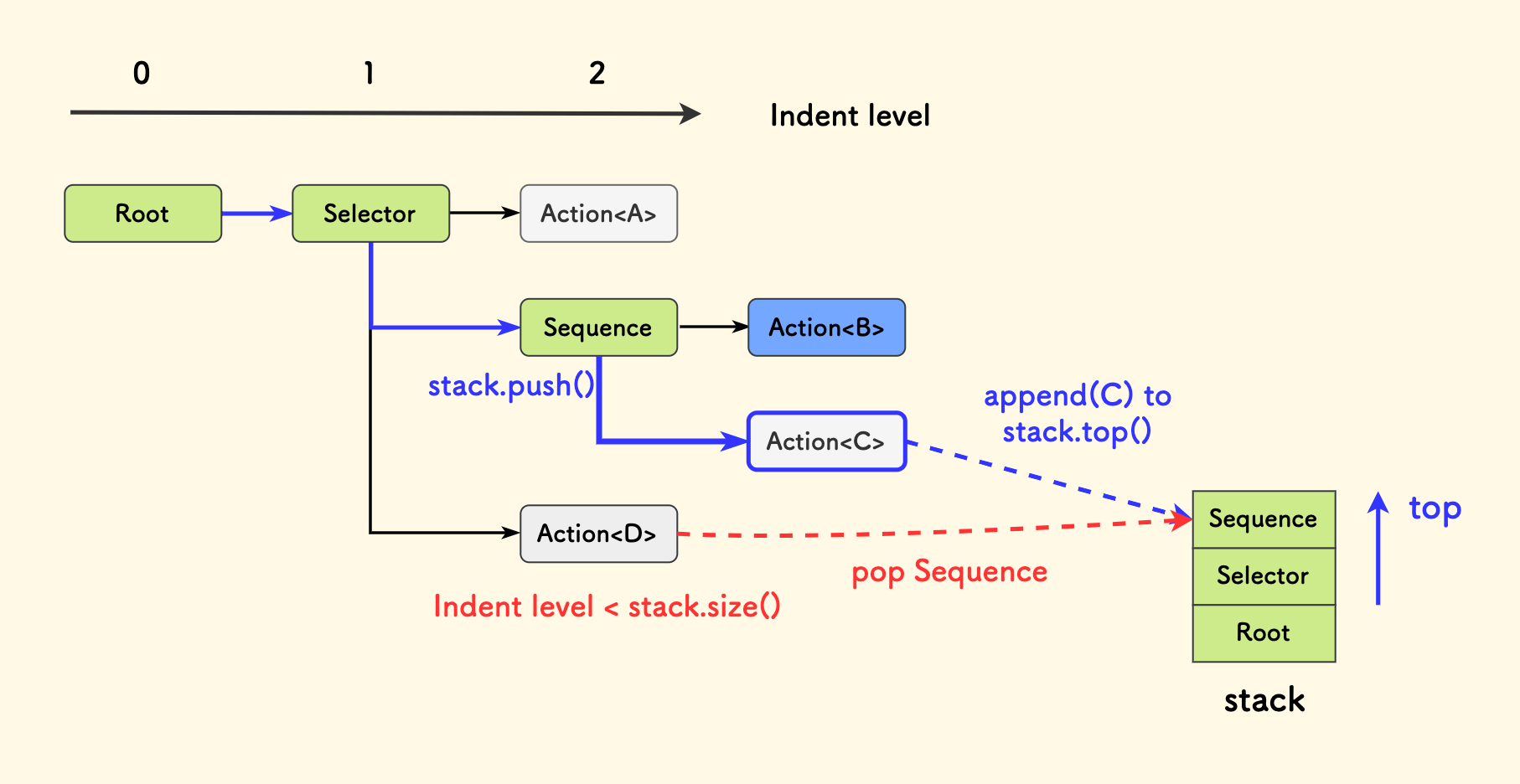
内部实现上,在构建一颗树时,有一个栈来保存「中间节点」的缩进路径:
std::stack<InternalNode*> stack;
- 当遇到一个「中间节点」时(比如一个组合节点)、则会把它
push到栈顶。 - 当遇到一个新的节点添加时,会看栈顶的「中间节点」(比如下方的
Sequence),作为其孩子节点。 - 当缩进收缩时,也就是小于栈的深度时,会抹平栈顶多余的部分,此时
Sequence节点封住、从栈中弹出。
子树 ¶
行为树最美妙的特点之一是,行为能力的模块化。
而且,我们可以把一套行为组成一颗树,然后挂载到另一颗树上,作为子树存在。这像极了函数中的子过程调用。
// Walk 函数构造一颗子树
auto Walk = [&](int poi) {
bt::Tree subtree("Walk");
subtree
.Sequence()
._().Action<Movement>(poi)
._().Action<Standby>()
.End()
;
return subtree;
};
root.
.RandomSelector()
._().Subtree(Walk(point1)) // 这里是 move
._().Subtree(Walk(point2)) // 这里是 move
.End();
其实行为树的描述本身就很像一种编程语言,你看,我还实现了 Switch/Case:
root
.Switch()
._().Case<ConditionX>()
._()._().Action<TaskX>()
._().Case<ConditionY>()
._()._().Action<TaskY>()
.End()
;
钩子函数 ¶
主要支持下面的几种钩子函数:
class MyAction : public bt::ActionNode {
public:
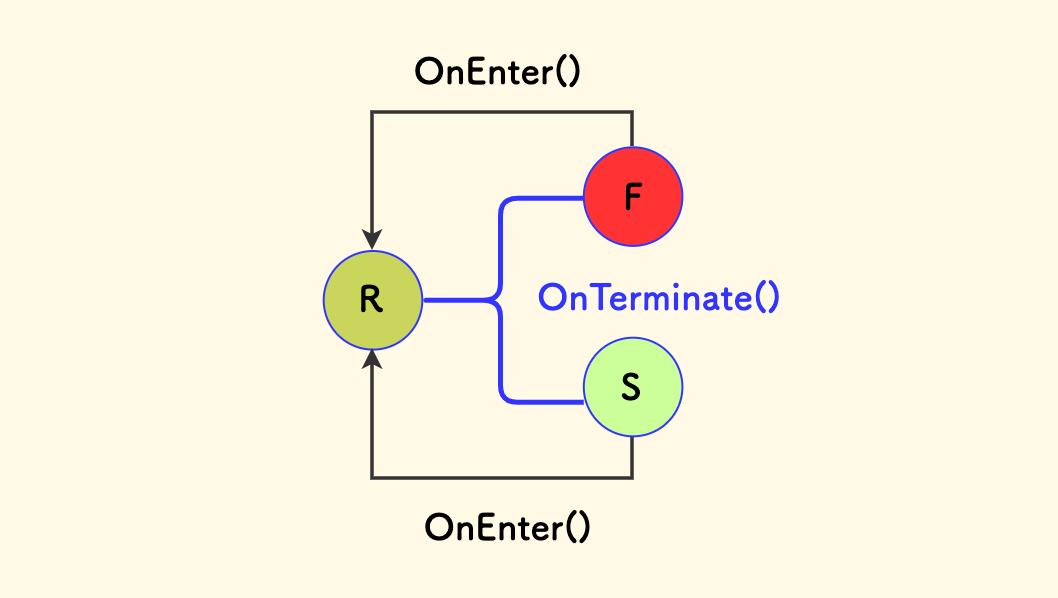
// 在一轮的开始时会被调用,就是说本节点的状态从其他变成 RUNNING 的时候:
virtual void OnEnter(const Context& ctx) {}
// 在一轮的结束时会被调用,就是说本节点的状态变成 FAILURE/SUCCESS 的时候:
virtual void OnTerminate(const Context& ctx, Status status) {}
// 在这个节点刚被构建完成时调用
virtual void OnBuild() {}
// 每一帧执行的 Update
virtual bt::Status Update(const Context& ctx) {}
};
其中 OnEnter 和 OnTerminate 的执行的时机可以看下图:
当然,这肯定依赖于「带状态」的数据,那么这些数据如何和行为树本身的组织分离呢?
数据和行为分离 ¶
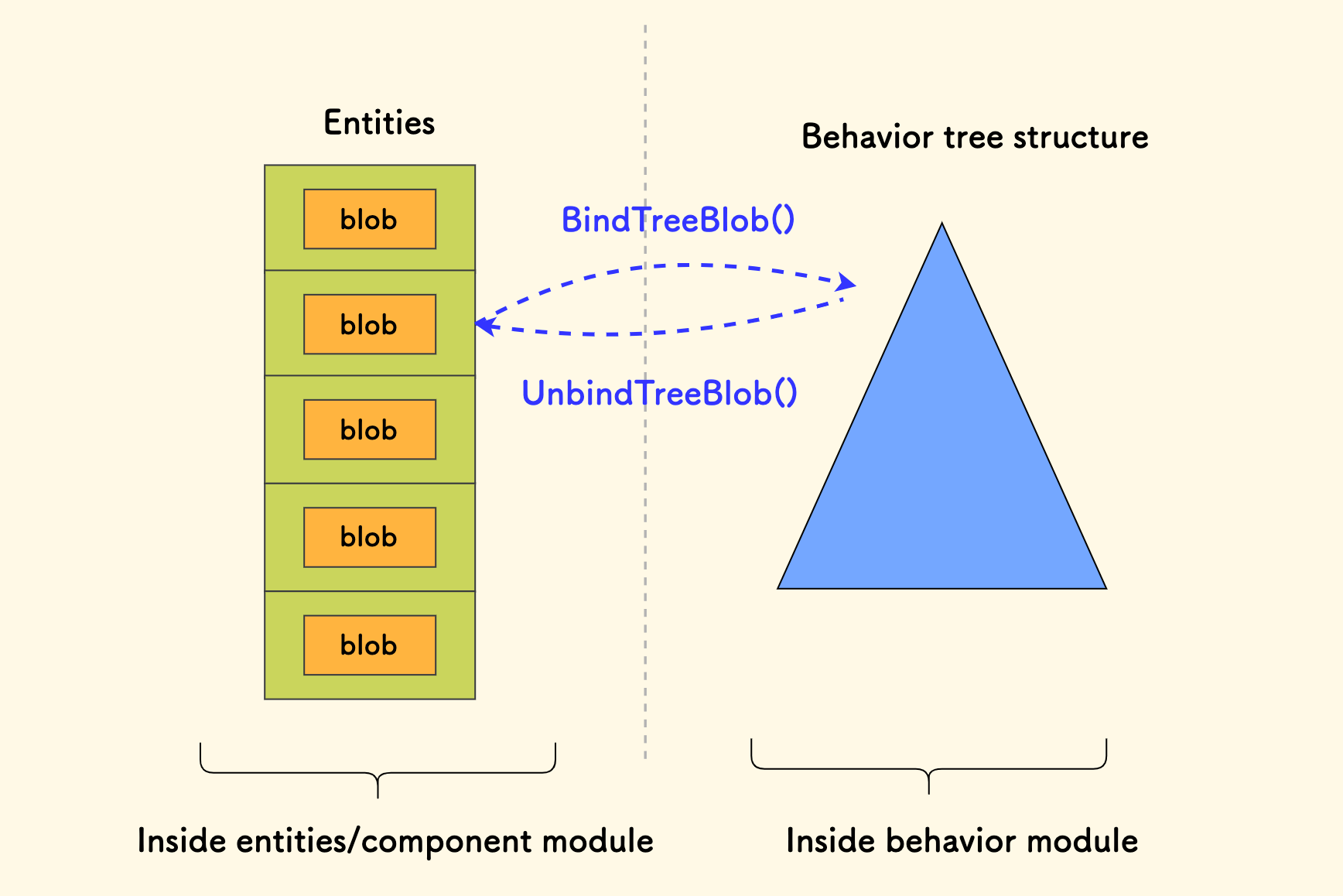
具体的说,是要把「实体相关的数据」和行为树本身分离开来。
在模块实现上,可能需要把所有实体放在一个模块、把行为树的这些 class 和树结构的代码放在另外一个模块(或者系统)。
我搞了一个叫做 TreeBlob 的概念,用来存储一颗行为树在某个实体上的数据,分为两种实现。
struct Entity {
// DynamicTreeBlob 存储行为树中所有和实体相关的状态数据
bt::DynamicTreeBlob blob;
// 或者用一个固定大小的 TreeBlob, 会直接内嵌到 Entity 结构体内
// 最多 8 个节点 x 每个节点最多64个字节, 固定大小二维数组
bt::FixedTreeBlob<8, 64> blob;
};
用哪一种都可以、FixedTreeBlob 更快点但是也麻烦点,它的好处是直接跟随实体的内存存储,缓存友好。
然后,通过「临时绑定」的方式,来让行为树操作实体数据,主循环中是这样的:
bt::Context ctx;
// Tick 主循环中
while(...) {
// 遍历每个实体的 blob 数据块
for (auto& e : entities) {
// 绑定一个实体的数据块
root.BindTreeBlob(e.blob);
++ctx.seq;
root.Tick(ctx)
// 解绑
root.UnbindTreeBlob();
}
}
bt.cc 中内置的有状态的节点(比如一些装饰器 RepeatNode, RetryNode 等、节点的通用状态数据) 都会保存在 blob 中,而不会直接跟随树结构。
总而言之,行为和实体数据在代码上、内存上都是分开的,通过临时绑定来在一起 work:
带状态的组合节点 ¶
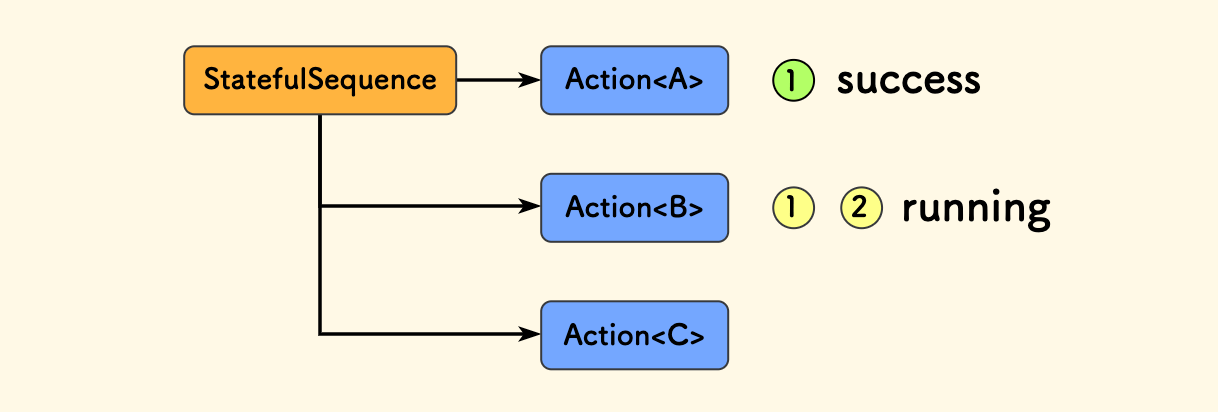
bt.cc 对三种组合节点,支持了「带状态」的能力,它们的设计意义在于,在一轮的执行中,可以避免重复的询问已经成功(或者已经失败)的子节点,提高效率。
下图以 StatefulSequence 为例,第 1 帧的时候,动作 A 执行成功,动作 B 处于执行中,第 2 帧的时候会直接跳过 A,从 B 开始询问 Tick。 直到所有的子节点成功或者失败,一轮算作结束。下一次执行就恢复如初。
在内部实现中,会有一个容器来存储哪些子节点需要跳过,在一轮的开始时会去清理它。
带优先级的组合节点 ¶
默认的情况,所有子节点之间是平权的,都是 1,会按照在树中组织的顺序、自上向下来 tick。
不过可以重载方法 Priority,来实现兄弟节点之间的不同优先级:
class A : public bt::ActionNode {
public:
unsigned int Priority(const bt::Context& ctx) const override {
// TODO, 返回一个正整数
}
};
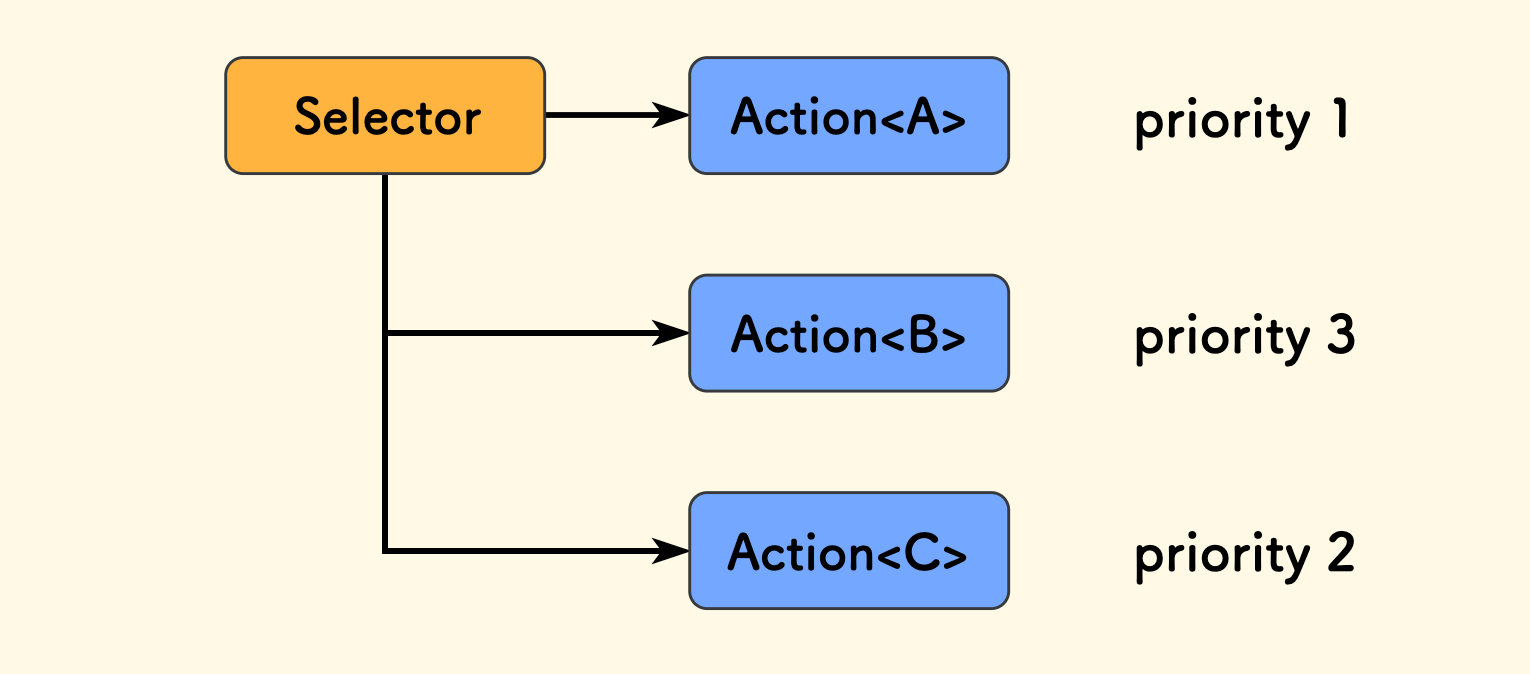
比如,对下图中的选择节点来说,会优先询问 B 的 Tick() 方法。
这个优先级是支持动态的,也就是说在两帧之间,优先级可以变化,一个组合节点会一直优先考虑最高优先级的子节点进行 Tick。
内部实现上,是采用了一个优先级队列。
细节上做了两点优化:
帧内优先级缓存
因为
Priority()方法会在每一帧递归执行,所以它的性能至关重要,内部会对当前帧的节点优先级进行缓存。也就是说,在同一帧内,保证每一个节点的优先级最多只被询问一次。
另外,虽然节点的优先级是和实体相关的数据,但是因为其生命周期仅限于一帧之内,所以大可放心的存在树节点上, 这样只作为树的运行时数据的意义存在。
等权优化
由于采用了优先级队列,理论上的时间复杂度就成为了
O(logN)。但是,这对于无需优先级的情况是一种性能退化。一种办法是,节点直接显式声明自己不考虑优先级。不过我目前还是采用了一个「运行时」一点的优化,即每一帧刷新
Priority的时候, 会看一下一个组合节点的所有子节点是否平权。如果是平权的话,那么就不按优先级队列、而是用一个一般的预设内存的O(N)队列来平替。下图中,在当前帧内,如果三个子节点是平权的,那么会走
q1,它是一个简单的 FIFO 队列(内存预先申请的、没有运行时内存申请), 否则,如果三个子节点不平权,那么会走q2,它是优先级队列,总体时间复杂度是logN的。

随机选择节点 ¶
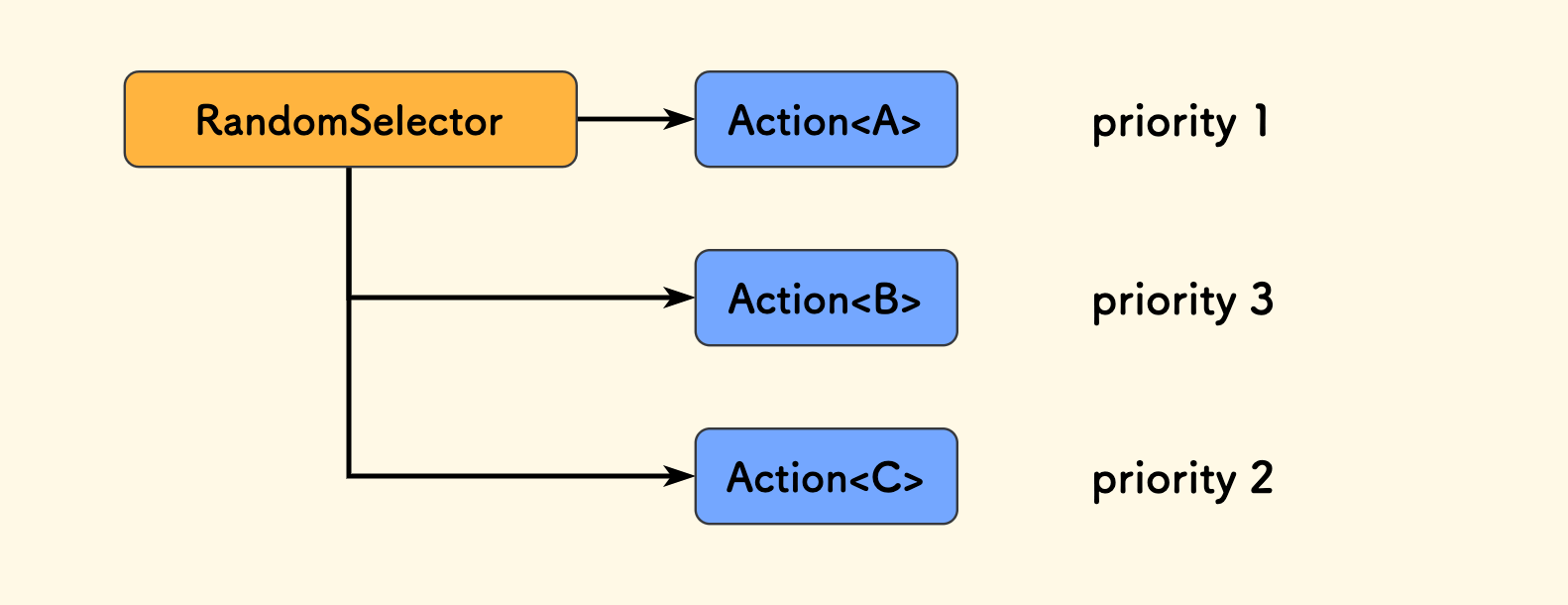
顺便支持了一个随机选择节点 RandomSelector,它的设计目的是,随机选择可以让 AI 变的不那么呆板,总不能每次做完全一样的事情。 我们的怪兽 NPC 可以这一次向左走巡逻、下一次向右走巡逻。
随机选择节点也会考虑节点的优先级,即加权随机,也即是说,权重越大的子节点,会有更大的概率被选中。
而又因为它是一种 Selector 节点,所以会不断随机选择,直到遇到一个成功的子节点,否则最终失败。
比如下面的图中,要执行哪一个子节点是不一定的,只能说 B 被选择的概率最高。
此外,带状态的随机选择也是支持的,叫做 StatefulRandomSelector,这种情况下,已经测试失败的子节点就不会被重复考察。
黑板 ¶
行为树中要访问外部数据,比如说叫做 world,一般是采用黑板。
我觉得没必要把黑板封装成一个哈希表之类的东西,用一个简单的 struct 就足够了,又快又简单。 核心点在于,这个黑板的字段、业务话题、类别怎么设计,重点在其内容设计、具体的容器形式并不需讲究、越封装反而性能越差。
Tick() 函数支持一个上下文结构的参数,可以把外部数据的指针,比如说 blackboard 结构体的指针,放在 data 这里:
struct Context {
ull seq; // 当前全局的 tick 帧号
std::chrono::nanoseconds delta; // 全局的从上一次 tick 到本次 tick 的时间差
std::any data; // 用户数据,比如可以存放一个指向黑板的指针
}
事件 ¶
我其实觉得,状态机更适合对事件做出反应,行为树则更偏向轮询的工作方式。所以行为树的性能比较浪费,它总要每次把可能的路径都询问一次。 有一种基于事件的行为树实现,不过我没有花太多功夫来理解这个「事件驱动」在正式的定义上是不是也是基于「轮询」的。
传统的行为树实现中,一切都起始于一个帧函数 Tick(),或者叫 Update(),那么如何把事件(信号)加进来呢?
为此,我单独实现了一个叫做 blinker.h 的信号库,它支持按信号名称组织成树,然后就可以按前缀匹配来订阅一批信号了。
把它用在行为树中,下图是一个示意,OnSignal 是一个自定义的装饰节点,表示只有所关心的信号激活时,才会向下传播 Tick。
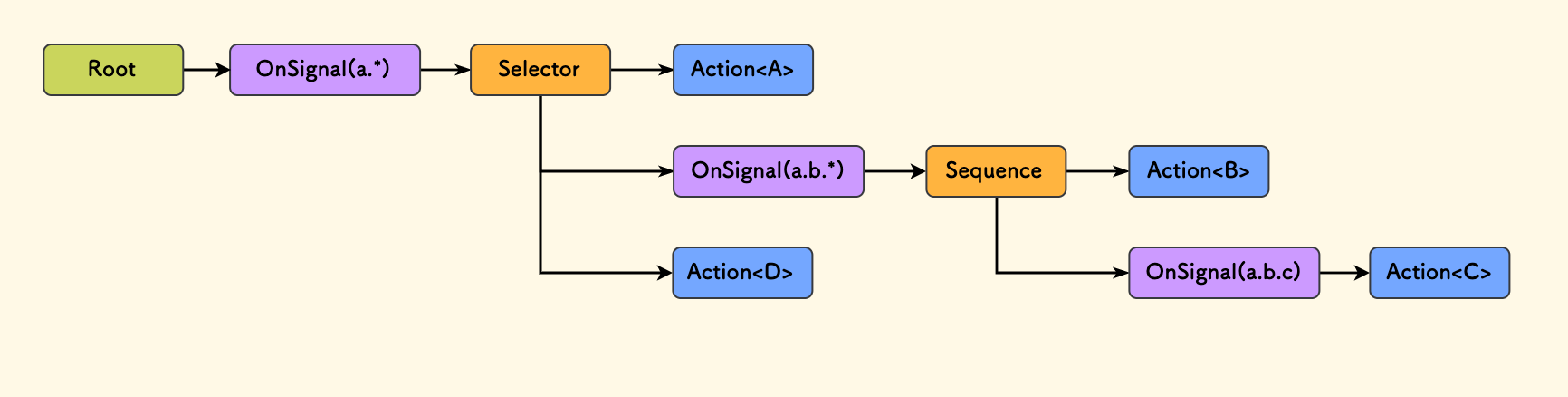
我们已经可以把信号组织成树,那么,把所需关心的信号,尽可能地向上提,就可以优化行为树的 Tick 轮询过程、减少空询。 这其实有点像一种「事件监控」。
在代码中,可以这样使用:
root
.OnSignal("a.*") // 一旦这里没匹配到信号,就不会向下 tick 了
._().Selector()
._()._().Action<a>()
._()._().OnSignal("a.b.*")
._()._()._().Sequence()
._()._()._()._().Action<B>()
._()._()._()._().OnSignal("a.b.c")
._()._()._()._()._().Action<C>()
._()._().Action<D>()
.End()
;
未竞的性能优化… ¶
现在有几个事实:
- 行为树在代码上是按照 dfs 顺序组织的
- 我们的
Tick是按照 dfs 顺序传播的 - 每一帧我们都需要从树根开始执行
Tick
那么,很自然有个问题,是否可以让所有节点在内存上按 dfs 连续排布,以讨好 cpu cache ? 在 《 Game AI Pro 1》 的行为树章节中,有提到这种性能优化的方法。 我兴冲冲地尝试实现了两次,就是简单地采用固定大小的连续内存的办法、但是压测都显示没有达到优化效果,所以算作一种「未竞的性能优化….」。
此外,关于「脚本」、「编辑器」,我都不怎么考虑,因为目前这个库就是给我这种(程序员)来用的,而程序员不怎么需要这些东西的支持,直接写在 C++ 程序中又快又轻巧~
最后,代码链接:https://github.com/hit9/bt.cc,欢迎给小星星。
(完)
本文原始链接地址: https://writings.sh/post/behavior-tree