本系列共分为四部分:
本文是第二部分。
哈希环法是最常用的、最经典的一致性哈希算法, 也叫做割环法。 这个算法易于理解、应用广泛(例如亚马逊的Dynamo), 实现了最小化的重新映射。
一致性哈希环算法 ¶
具体的算法:
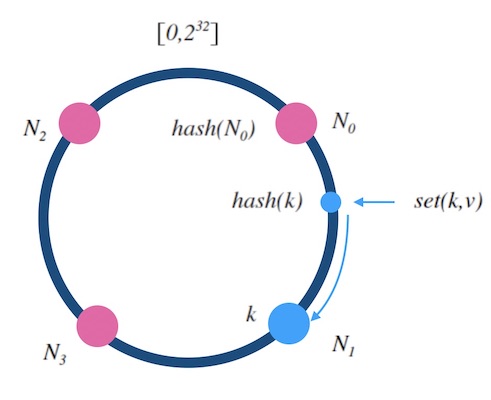
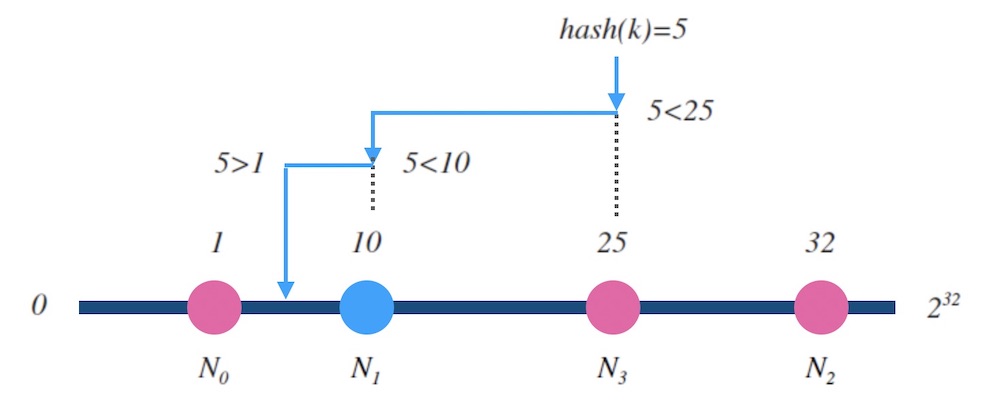
- 设 $hash(key)$ 是映射到区间 $\left[ 0,2^{ 32 } \right] $ 上的一个哈希函数。 把区间首尾相连,形成一个顺时针增长的哈希环(如图5.1) 。
- 将所有槽位(或者节点) $N_0, .., N_{n-1}$ 的标号 $0, …, n-1$ 依次作为 $hash$ 函数的输入进行哈希, 把结果分别标记在环上。
对于关于 $k$ 的映射,求出 $z = hash(k)$ , 标记在环上:
- 如果 $z$ 正好落在槽位上,返回这个槽位的标号。
- 否则, 顺时针沿着环寻找离 $z$ 最近的槽位,返回槽位标号。
我们接下来讨论下, 当新增和删除槽位时, 哈希环的表现如何。
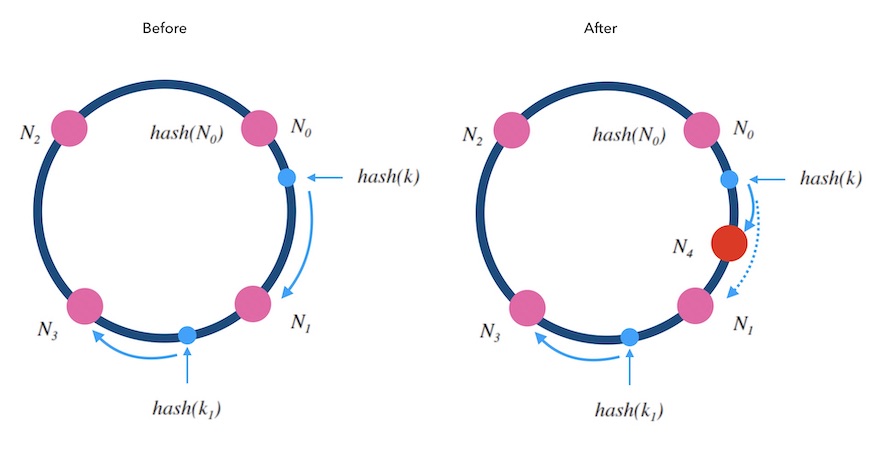
当往一个哈希环中新增一个槽位时,如下图5.2中, 红色的 $N_4$ 是新增的槽位。 可以看到 $k$ 从 $N_1$ 重新映射到了 $N_4$ , 而 $k_1$ 的映射结果不变。 稍加分析可以知道, 只有被新增槽位拦下来的 $k$ 的映射结果是变化了的。 新增槽位拦截了原本到下一节点的部分映射,其他槽位不受影响。 对于kvdb的例子 来说, 顺时针方向的下一个节点 $N_1$ 需要迁移部分数据到新节点 $N_4$ 上才可以正常服务, 其他节点不受影响。
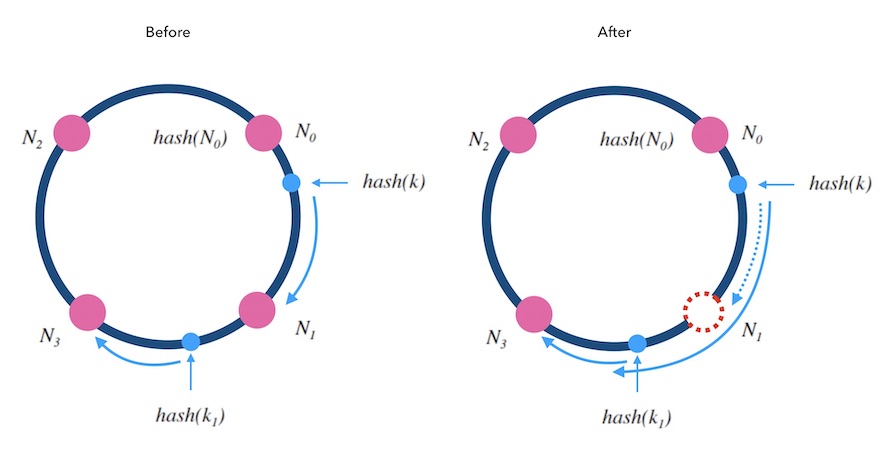
当从一个哈希环中移除一个槽位时, 如下图5.3中, 红色的 $N_1$ 是被删除的槽位。 可以看到 $k$ 从 $N_1$ 重新映射到了 $N_3$, 而 $k_1$ 的映射结果不变。 被删除槽位的映射会转交给下一槽位,其他槽位不受影响。 对于kvdb的例子来说, 顺时针方向的原本映射到 $N_1$ 的请求会被 转交到顺时针方向的下一个节点 $N_3$ 处理, 所以需要迁移 $N_1$ 的数据到 $N_3$ 才可以正常服务。
哈希环做到了在槽位数量变化前后的增量式的重新映射, 避免了全量的重新映射。
假设整体的 $k$ 的数量是 $K$ , 由于哈希映射的均匀性, 所以,添加或者删除一个槽位,总会只影响一个槽位的映射量,也就是 $1/K$ , 因此,哈希环做到了最小化重新映射(minimum disruption),做到了完全的一致性。
哈希环法的复杂度分析 ¶
在技术实现上,实现哈希环的方法一般叫做 ketama 或 hash ring。 核心的逻辑在于如何在环上找一个和目标值 $z$ 相近的槽位, 我们把环拉开成一个自然数轴, 所有的槽位在环上的哈希值组成一个有序表。 在有序表里做查找, 这是二分查找可以解决的事情, 所以哈希环的映射函数的时间复杂度是 $O(log {n})$。
附注: 我对ketama做了简单的实现: C语言版本, Go语言版本。
对于空间复杂度,显然是 $O(n)$。
带权重的一致性哈希环 ¶
实际应用中, 还可以对槽位(节点)添加权重。 大概的逻辑是构建很多指向真实节点的虚拟节点, 也叫影子节点。 影子节点之间是平权的,选中影子节点,就代表选中了背后的真实节点。 权重越大的节点,影子节点越多, 被选中的概率就越大。
下面的图6.2是一个例子, 其中 $N_0, N_1, N_2, N_3$ 的权重比是 $1:2:3:2$。 选中一个影子节点如 $V(N_2)$ 就是选中了 $N_2$ 。
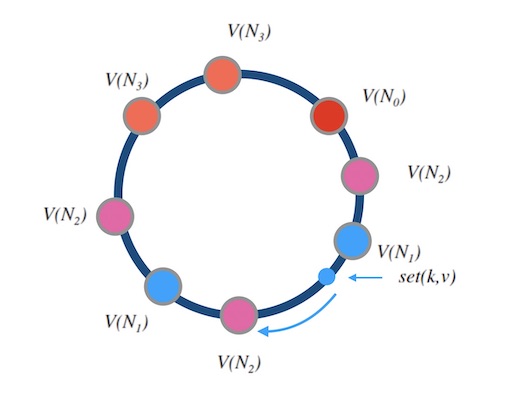
但是需要注意的是, 权重的调整会带来数据迁移的工作。
哈希环上的映射分布的均匀性 ¶
实际应用中,即使节点之间是平权的, 也会采用影子节点。 比如,常用的ketama方法中,一般采用一个节点对应40个影子节点。 原因是,节点越多、映射的分布越均匀, 采用影子节点可以减少真实节点之间的负载差异。
一致性哈希环算法的映射结果仍然不是很均匀[1]:
With 100 replicas (“vnodes”) per server, the standard deviation of load is about 10%. Increasing the number of replicas to 1000 points per server reduces the standard deviation to ~3.2%.
意思是, 当有100个影子节点时,哈希环法的映射结果的分布的标准差大约有 $10\%$。 当影子节点增加到1000个时,这个标准差降到 $3.2\%$ 左右。
另外,和下一篇文章讨论的跳跃一致性哈希算法的均匀性对比, 哈希环的表现也不是很好。
影子节点是一个绝妙的设计,不仅提高了映射结果的均匀性, 而且为实现加权映射提供了方式。 但是,影子节点增加了内存消耗和查找时间, 以常用的ketama为例, 每个节点都对应40个影子节点, 内存的消耗从 $O(n)$ 变为 $O(40n)$ , 查找时间从 $O(logn)$ 变为 $O(log(40n))$ 。
一致性哈希环下的热扩容和容灾 ¶
回到kvdb的例子上来, 对于增删节点的情况,哈希环法做到了增量式的重新映射, 不再需要全量数据迁移的工作。 但仍然有部分数据出现了变更前后映射不一致, 技术运营上仍然存在如下问题:
- 扩容:当增加节点时,新节点需要对齐下一节点的数据后才可以正常服务。
- 缩容:当删除节点时,需要先把数据备份到下一节点才可以停服移除。
- 故障:节点突然故障不得不移除时,面临数据丢失风险。
如果我们要实现动态扩容和缩容,即所谓的热扩容,不停止服务对系统进行增删节点, 可以这样做:
- 数据备份(双写): 数据写入到某个节点时,同时写一个备份(replica)到顺时针的邻居节点。
- 请求中继(代理): 新节点刚加入后,数据没有同步完成时,对读取不到的数据,可以把请求中继(replay)到顺时针方向的邻居节点。
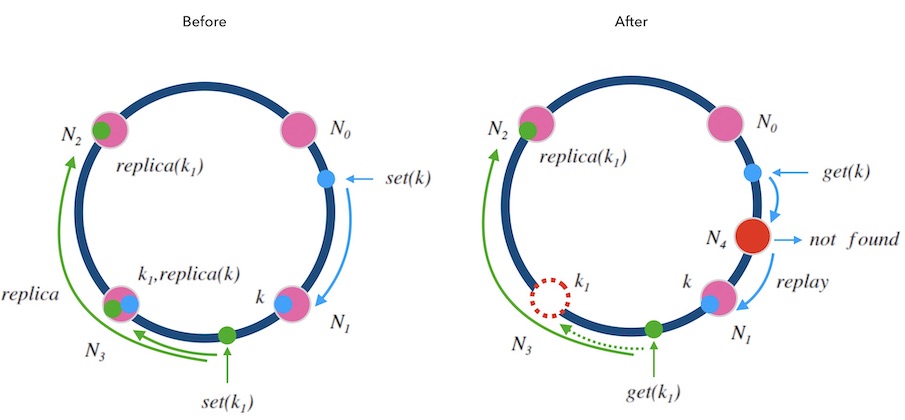
下面的图7.1中演示了这两种规则:
- 移除节点的情况: 每一个节点在执行写请求时,都会写一个备份到顺时针的邻居节点。 这样,当 $N_3$ 节点因故障需要踢除时,新的请求会交接给它的邻居节点 $N_2$, $N_2$ 上有 $k_1$ 的备份数据,可以正常读到。
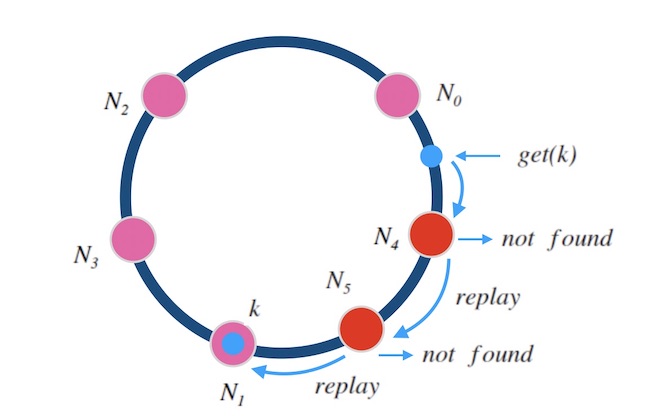
新增节点的情况: 对于新增节点的情况稍微复杂点, 当新增节点 $N_4$ 时, $N_4$ 需要从邻居节点 $N_1$ 上同步数据, 在同步仍未完成时,可能遇到的请求查不到数据, 此时可以先把请求中继给 $N_1$ 处理, 待两个节点数据对齐后,再结束中继机制。
就像细胞分裂一样, $N_4$ 刚加入时可以直接算作时 $N_3$ 的一部分, $N_3$ 算作一个大节点, 当数据对齐后, $N_4$ 再从 $N_3$ 中分裂出来,正式成为新节点。
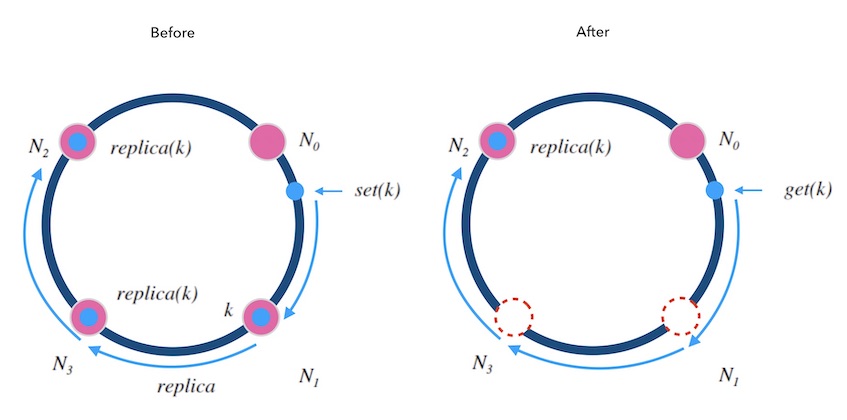
另外, 可以备份不止一份。 下面图7.2中演示了备份两次情况, 每个写请求都将备份同步到顺时针方向的最近的两个节点上。 这样就可以容忍相邻的两节点损失的情况, 进一步提高了系统的可用性。
同样的,中继也可以不止一次。 下面图7.3中演示了中继两次的情况, 如果一个节点上查不到数据,就中继给下一个节点,最多两次中继, 这样就可以满足同时添加”两个正好在环上相邻的”节点的情况了。
小结 ¶
哈希环法是经典的一致性哈希算法, 避免了因槽位数量变化导致的全量重新映射, 实现了最小化的重新映射。 时间复杂度是 $O(log(n))$ , 空间复杂度是 $O(n)$, 实际根据影子节点数量而乘上相应倍数。 映射均匀性不是很优秀。 热扩容和容灾的方式比较直观。
– 毕「一致性哈希算法 - 哈希环法」。
本系列的下一文章 一致性哈希算法(三) - 跳跃一致性哈希法。
引用和脚注 ¶
- Damian Gryski Consistent Hashing: Algorithmic Tradeoffs
本文原始链接地址: https://writings.sh/post/consistent-hashing-algorithms-part-2-consistent-hash-ring